「なんでもピックアップ」話題のハーバード大学発Soft Robotics ティーチレス自己学習型ハンドやAMR協働ロボットをGROUNDが展開
「なんでもピックアップ」話題のハーバード大学発Soft Robotics ティーチレス自己学習型ハンドやAMR協働ロボットをGROUNDが展開:
 GROUND株式会社は、物流や流通業界に特化したロボットソリューションや先端技術を開発したり販売する企業だ。研究開発にも積極的で、2018年8月、独自に研究を行うR&Dセンター「playGROUND」を千葉県市川市に設立している。
GROUND株式会社は、物流や流通業界に特化したロボットソリューションや先端技術を開発したり販売する企業だ。研究開発にも積極的で、2018年8月、独自に研究を行うR&Dセンター「playGROUND」を千葉県市川市に設立している。
同社は「第3回 スマート工場 EXPO」内のスマート物流ゾーンに出典し、2つのロボットを展示した。ひとつは今夏に販売を開始する自律型協働ロボットAMR(Autonomous Mobile Robot)。もうひとつは米国をはじめとして海外で注目を集めているソフトロボティクス(Soft Robotics)のロボットハンド(グリッパー)だ。
例えば、AMRを物流倉庫で使用する場合、倉庫管理システム(WMS)や商品発送管理システムとAMRロボットが連携する。AMRは商品の発注が入ると、倉庫内でピックアップしなければならない注文された商品の保管棚へと自律的に移動し、止まる。スタッフは自分の担当するエリアで止まっているAMRのもとに行き、ディスプレイに表示されている製品と個数を取り出してロボットのカゴに入れていく。


■動画 GROUND AMRのデモ

様々な形状や硬さ/柔らかさのものをつかむことができ、既に米国を中心に100社以上で試験採用されている。そしてもうひとつが、最新ビジョン技術やアルゴリズムを使った最新版となる「SuperPick」(スーパーピック)だ。非定型な個体を人間の手のように高い精度とスピードでピッキングすることができる画期的なロボティックピッキングソリューションとして注目されている。

■動画 Soft Robotics Picking DEMO , GROUND
では、ティーチレスの「自己学習機能」とは何か。
カメラ(ビジョン)が捉えた物体の輪郭がわかれば、ロボットは今までの経験から重心やパランスを推定して、把持して持ち上げることができる。しかし、人間もそうであるように、思ったより重かったり、重心が異なっていたら、物体を落としてしまうだろう。そこでいくつかの学習方法が用意されている。
掴んで持ち上げてからAIが重さなどを判断して、重心やバランスなどを推測して持ち上げることができるが、フルオートは失敗しながらも、AIが全自動で自己学習していくモードだ。ひとつはマニュアルモードで、これは人間がタッチパネル画面で把持しやすい場所を教えられるUIがあり、ロボットがそれによって把持を学習し、次回から同様に形状のものに対して持ちやすい場所を推定できるモードだ。
3つめがその中間でセミオート。把持するのに危ないとAIが推測した部分がカラー表示され、人間がそれに対して画面上から補正をすることもできる。これも人間が教えることでAIが学習していく。
これが自己学習のしくみだ。ほとんどのものは予め学習してあるためティーチレスで把持することかできる。
ロボットハンドの導入には、ティーチングの作業が必要で、これは大変な作業だった。ティーチレスになることで、ほとんどのモノがつかめる状態でロボットハンドを導入できることになる。これは革新的なことだ。ソフトロボティクスのハンド技術は次世代の可能性を秘めていると言えるだろう。
同社は「第3回 スマート工場 EXPO」内のスマート物流ゾーンに出典し、2つのロボットを展示した。ひとつは今夏に販売を開始する自律型協働ロボットAMR(Autonomous Mobile Robot)。もうひとつは米国をはじめとして海外で注目を集めているソフトロボティクス(Soft Robotics)のロボットハンド(グリッパー)だ。
自律型協働ロボットAMRとは
AMRロボットは主に倉庫や工場などで、発送や出荷のために製品などを集める業務をサポートするロボットだ。例えば、AMRを物流倉庫で使用する場合、倉庫管理システム(WMS)や商品発送管理システムとAMRロボットが連携する。AMRは商品の発注が入ると、倉庫内でピックアップしなければならない注文された商品の保管棚へと自律的に移動し、止まる。スタッフは自分の担当するエリアで止まっているAMRのもとに行き、ディスプレイに表示されている製品と個数を取り出してロボットのカゴに入れていく。
AMRはタブレット、製品を運ぶためのカゴ、足元にAGV(自律型運搬ロボット)で構成される
すなわち、同梱する商品やピックアップすべき商品の管理と、棚までの誘導をシステムとAMRが行い、ロボットにはまだ難しい商品のピッキングを人間が行う協働作業、ということになる。AMRが待機する場所で、目的の製品を人がピッキングする協働作業
このロボットの特長は、ロボット自身が物流施設内を自律的にマッピングする自律走行を実現することで、施設内のレイアウトを大幅に変更することなく、スピーディーに導入が行える。また、操作方法が直感的であることから、作業者への教育期間を短くでき、導入する事業者にとって、導入に伴う負担が少ないことも利点のひとつとしている。■動画 GROUND AMRのデモ
【AMRの主な特徴】
・先端のSLAM技術とカメラ・レーザーの連携により、ロボット自身がタイムリーに位置情報を獲得し、自律的に物流施設をマッピングすることができる。これにより、従来のようなロボットへの膨大な事前インプットの必要がなくなる。
・物流施設内の作業オペレーションやレイアウトの大幅な変更をすることなく、スピーディーな導入が可能。
・直観的な操作性により、作業者への教育を最小限に留めることができる。
ロボットが得意なことが商品の管理や運搬、人が得意なことがピッキングだと解説したが、物流倉庫のようなさまざまな形状の製品を取り扱う現場でのピッキングは、ロボットができるようにはならないのだろうか。そのソリューションが次に紹介するソフトロボティクスのハンドということになる。・先端のSLAM技術とカメラ・レーザーの連携により、ロボット自身がタイムリーに位置情報を獲得し、自律的に物流施設をマッピングすることができる。これにより、従来のようなロボットへの膨大な事前インプットの必要がなくなる。
・物流施設内の作業オペレーションやレイアウトの大幅な変更をすることなく、スピーディーな導入が可能。
・直観的な操作性により、作業者への教育を最小限に留めることができる。
どんな形状のものでも把持するハンドへの挑戦
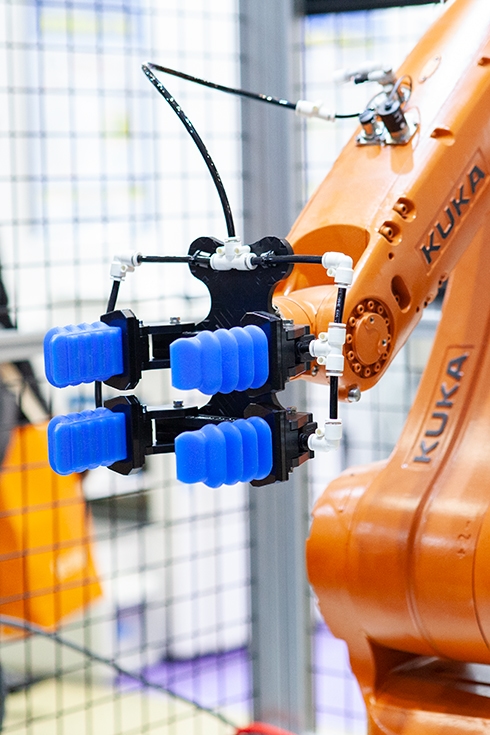
そのデモはロボットアーム、ロボットハンド(グリッパー)、そしてカメラで構成されている。ソフトロボティクスの独特の先進技術はロボットハンドの部分にある(実際、ロボットアームは写真のとおり、KUKA製のものが使われている)。このユニークなロボットハンドの特徴のひとつはその素材にある。様々な形状や硬さ/柔らかさのものをつかむことができ、既に米国を中心に100社以上で試験採用されている。そしてもうひとつが、最新ビジョン技術やアルゴリズムを使った最新版となる「SuperPick」(スーパーピック)だ。非定型な個体を人間の手のように高い精度とスピードでピッキングすることができる画期的なロボティックピッキングソリューションとして注目されている。
「SuperPick」運用イメージ
また、スーパーピックには、ティーチングが不要な「ティーチレス」仕様、自己学習機能を装備しているとしている。残念ながらこのデモ機はスーパーピックではなく、ティーチングによって把持を学習したシステムだったが、近く最新版のスーパーピックが搭載される予定だと言う。■動画 Soft Robotics Picking DEMO , GROUND
ティーチレスの「自己学習機能」
ソフトロボティクスは、2013年にハーバード大学ホワイトサイドリサーチグループ(Whitesides Research Group)の研究員達が中心となり創業した米国マサチューセッツ州に本社を置くベンチャー企業。AI、クラウドコンピューティングおよび素材(マテリアルサイエンス)の技術を応用したピッキングソリューションの開発・提供を行っている。その研究成果のひとつとして、どんなカタチのものでも掴めるロボットハンドの素材としくみが開発された。カメラ(ビジョン)が捉えた物体の輪郭がわかれば、ロボットは今までの経験から重心やパランスを推定して、把持して持ち上げることができる。しかし、人間もそうであるように、思ったより重かったり、重心が異なっていたら、物体を落としてしまうだろう。そこでいくつかの学習方法が用意されている。
掴んで持ち上げてからAIが重さなどを判断して、重心やバランスなどを推測して持ち上げることができるが、フルオートは失敗しながらも、AIが全自動で自己学習していくモードだ。ひとつはマニュアルモードで、これは人間がタッチパネル画面で把持しやすい場所を教えられるUIがあり、ロボットがそれによって把持を学習し、次回から同様に形状のものに対して持ちやすい場所を推定できるモードだ。
3つめがその中間でセミオート。把持するのに危ないとAIが推測した部分がカラー表示され、人間がそれに対して画面上から補正をすることもできる。これも人間が教えることでAIが学習していく。
これが自己学習のしくみだ。ほとんどのものは予め学習してあるためティーチレスで把持することかできる。
ロボットハンドの導入には、ティーチングの作業が必要で、これは大変な作業だった。ティーチレスになることで、ほとんどのモノがつかめる状態でロボットハンドを導入できることになる。これは革新的なことだ。ソフトロボティクスのハンド技術は次世代の可能性を秘めていると言えるだろう。
【SuperPick の特長】
1、重さ、素材、形が異なる物や精度を求められるさまざまな物品をピックアップできる
米国で特許を取得している高品質な素材で作られたハンドは、-10℃〜65℃の耐熱性があり、物品の重さ、素材、形を問わずにピックアップが可能。物品を掴むハンドの素材は、最先端科学を応用し、ハーバード大学の材料科学発明によって独自開発したものを採用している。
2、ピッキングエラーが少なく、業務効率化を実現
物品のアウトラインを捉えるビジョンカメラ、独自開発されたアルゴリズム、特許を取得しているピッキングハンド部分の素材により、物品の重心や形状、重さを予測し、人の手を再現した正確でスピーディなピックアップを可能とした。
3、物の形状と掴み方などの情報を自律的に蓄積・学習することにより、生産性向上を実現
人の介在と事前のインプット情報を最小にする設計となっており、物品をピックアップするために必要な情報を自律的に蓄積・適正化し、学習することで、ピッキング作業全体の生産性の向上を実現した。
■【動画】ロボティックピッキング『SuperPick(スーパーピック)』
1、重さ、素材、形が異なる物や精度を求められるさまざまな物品をピックアップできる
米国で特許を取得している高品質な素材で作られたハンドは、-10℃〜65℃の耐熱性があり、物品の重さ、素材、形を問わずにピックアップが可能。物品を掴むハンドの素材は、最先端科学を応用し、ハーバード大学の材料科学発明によって独自開発したものを採用している。
2、ピッキングエラーが少なく、業務効率化を実現
物品のアウトラインを捉えるビジョンカメラ、独自開発されたアルゴリズム、特許を取得しているピッキングハンド部分の素材により、物品の重心や形状、重さを予測し、人の手を再現した正確でスピーディなピックアップを可能とした。
3、物の形状と掴み方などの情報を自律的に蓄積・学習することにより、生産性向上を実現
人の介在と事前のインプット情報を最小にする設計となっており、物品をピックアップするために必要な情報を自律的に蓄積・適正化し、学習することで、ピッキング作業全体の生産性の向上を実現した。
■【動画】ロボティックピッキング『SuperPick(スーパーピック)』
Superpick: The Autonomous Bin Picking, Sorting and Order Fulfillment Solution
コメント
コメントを投稿