東工大・鈴森教授ら、ロボット用油圧アクチュエーターを事業化するH-MUSCLE社を設立 頑丈で力が強く、軽く滑らかに動く
東工大・鈴森教授ら、ロボット用油圧アクチュエーターを事業化するH-MUSCLE社を設立 頑丈で力が強く、軽く滑らかに動く:


東京工業大学工学院 機械系の鈴森康一教授らは、2018年12月25日、タフな油圧駆動型ロボット用アクチュエーターの実用化を推進する東工大発ベンチャー企業・H-MUSCLE(エイチマスル)株式会社(https://www.h-muscle.com)を10月17日に設立したと発表し、東工大で記者会見を行った。
ロボット用油圧アクチュエーターは、内閣府革新的研究開発推進プログラム(ImPACT)「タフ・ロボティクス・チャレンジ」(2014-2018年度)による成果。東工大のほか、小型油圧シリンダの専門メーカーであるJPN株式会社(http://www.j-p-n.co.jp)、株式会社ブリヂストン、KYB株式会社ほか、他大学と油圧関連企業が参加して2014年から開発を進めてきたもの。
従来アクチュエーターと比較すると小型・軽量・大出力・低摺動(低摩擦)である点が特徴。2019年2月から国内メーカーに油圧シリンダーと油圧モーターのサンプル出荷を開始、用途開拓を進める。製造と詳細設計は共同開発したJPN株式会社に委託する。
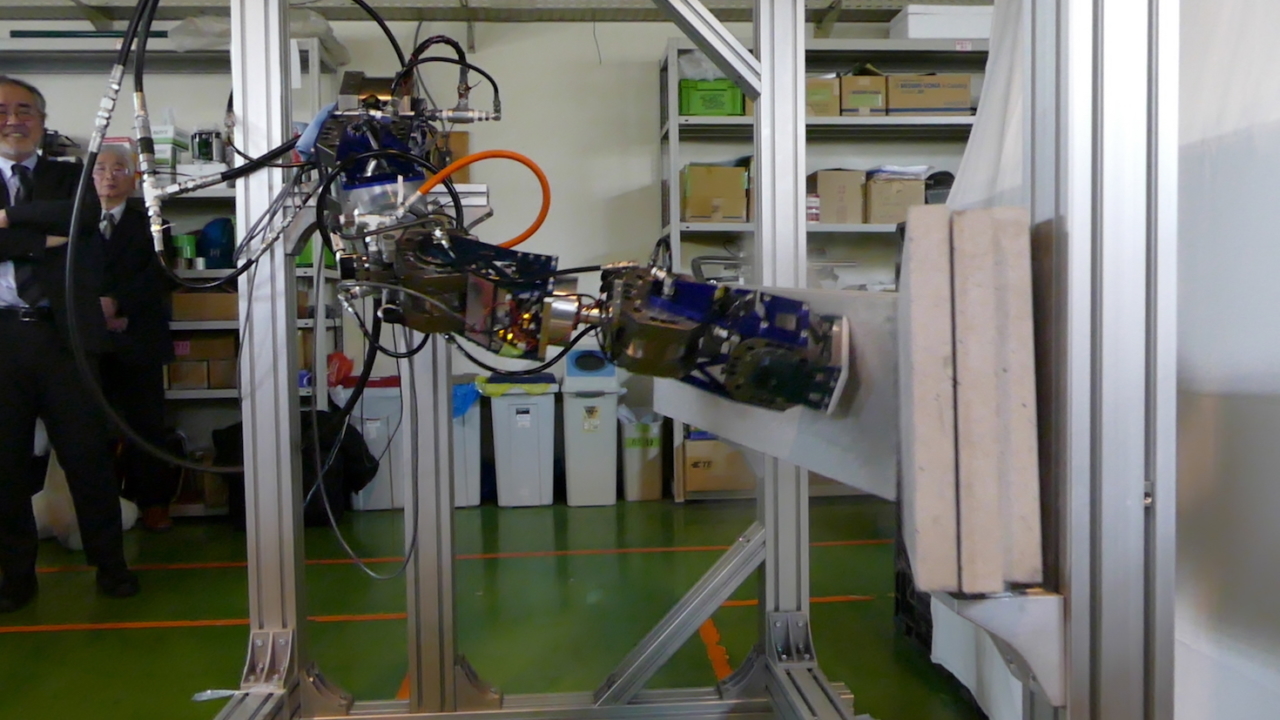
会見では、開発されたアクチュエータを用いて、厚さ3cmのコンクリート製建材を3つ重ねたものをロボットアーム(脚)でぶち破ったり、ハンドを使って重さ40kgのテトラポッドを持ち上げたり、柔軟なタイヤを扱うデモが行われた。


対象物の形状に応じたハンド形状の変更のほか、握りの力も制御できるので、変形する物体も掴むことができる。ハンド自体の重量はおよそ90kg。握力は最大約300kgから最小1.4kg。
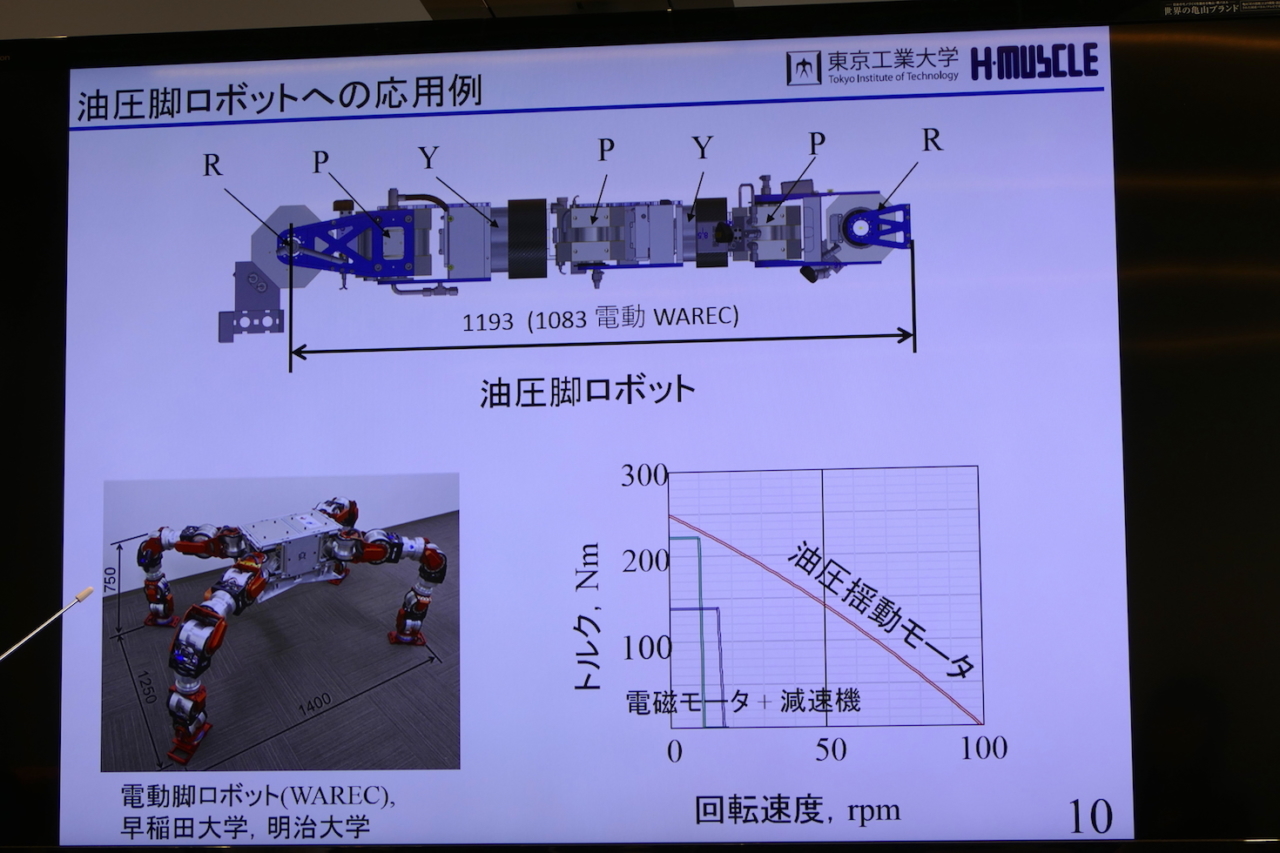
早稲田大学の脚式ロボット「WAREC」と同じ構成の脚も、油圧揺動モーターを使って実現できることを示している。油圧揺動モーターを使うと、大きな力と素早い動きを両立できる。


東京工業大学工学院 機械系の鈴森康一教授らは、2018年12月25日、タフな油圧駆動型ロボット用アクチュエーターの実用化を推進する東工大発ベンチャー企業・H-MUSCLE(エイチマスル)株式会社(https://www.h-muscle.com)を10月17日に設立したと発表し、東工大で記者会見を行った。
ロボット用油圧アクチュエーターは、内閣府革新的研究開発推進プログラム(ImPACT)「タフ・ロボティクス・チャレンジ」(2014-2018年度)による成果。東工大のほか、小型油圧シリンダの専門メーカーであるJPN株式会社(http://www.j-p-n.co.jp)、株式会社ブリヂストン、KYB株式会社ほか、他大学と油圧関連企業が参加して2014年から開発を進めてきたもの。
従来アクチュエーターと比較すると小型・軽量・大出力・低摺動(低摩擦)である点が特徴。2019年2月から国内メーカーに油圧シリンダーと油圧モーターのサンプル出荷を開始、用途開拓を進める。製造と詳細設計は共同開発したJPN株式会社に委託する。
会見では、開発されたアクチュエータを用いて、厚さ3cmのコンクリート製建材を3つ重ねたものをロボットアーム(脚)でぶち破ったり、ハンドを使って重さ40kgのテトラポッドを持ち上げたり、柔軟なタイヤを扱うデモが行われた。
シリンダと揺動モータの販売を2019年2月から開始
東京工業大学工学院教授、株式会社H-MUSCLE 代表取締役 鈴森康一氏。後ろは東工大助教でH-MUSCLE取締役の難波江(なばえ)裕之氏と、同取締役でJPN株式会社社長の日沖清弘氏
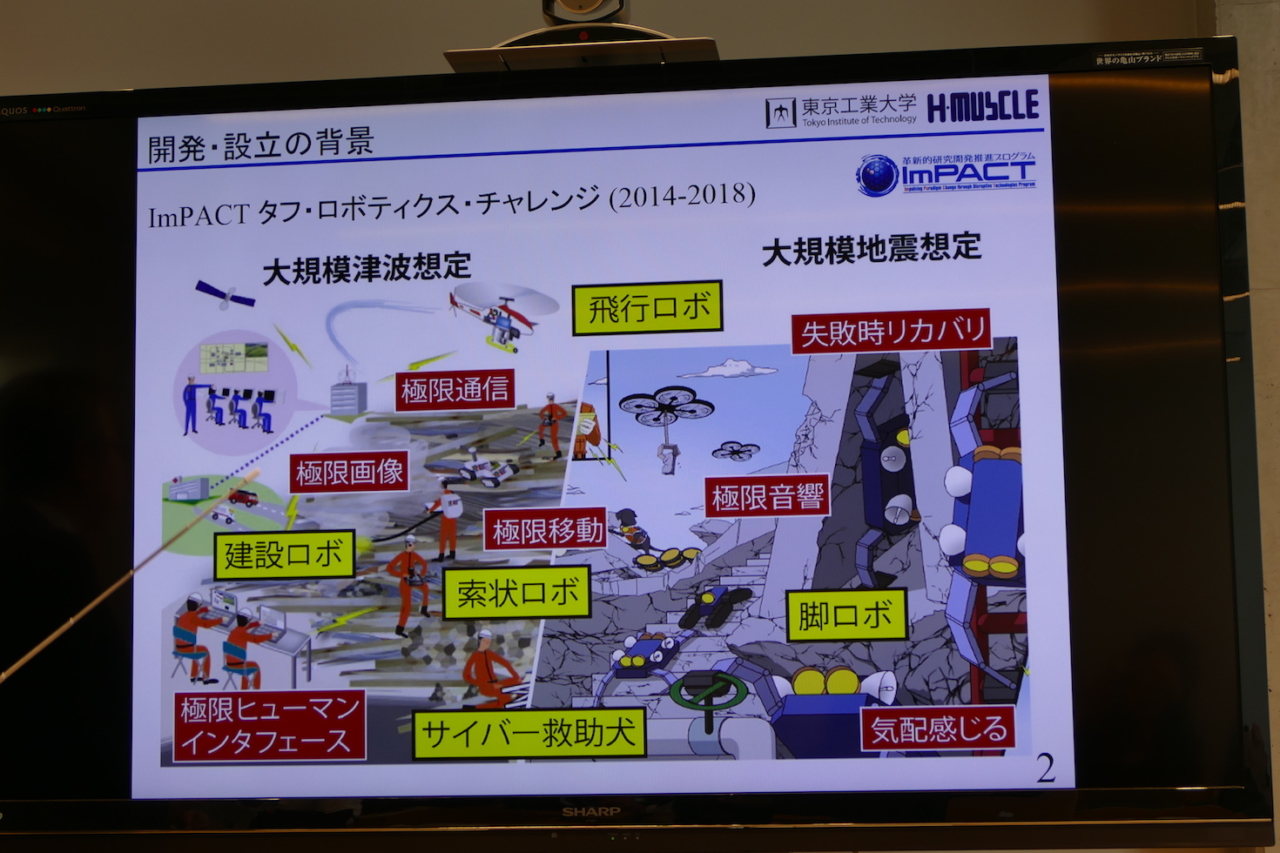
東京工業大学工学院教授で株式会社H-MUSCLE 代表取締役の鈴森康一氏は、内閣府革新的研究開発推進プログラム(ImPACT)「タフ・ロボティクス・チャレンジ」(2014-2018年度)の概要から紹介した。「タフ・ロボティクス・チャレンジ」は災害時にも使えるタフなロボット開発を目指したプロジェクトだ。飛行ロボット、建設ロボット、索状ロボット、サイバー救助犬、客ロボットの5種類のロボットが開発されている。鈴森氏はこのなかで油圧アクチュエーターの開発に携わった。新型油圧アクチュエーターは、建設ロボットと脚ロボットに活用されている。ImPACT「タフ・ロボティクス・チャレンジ」
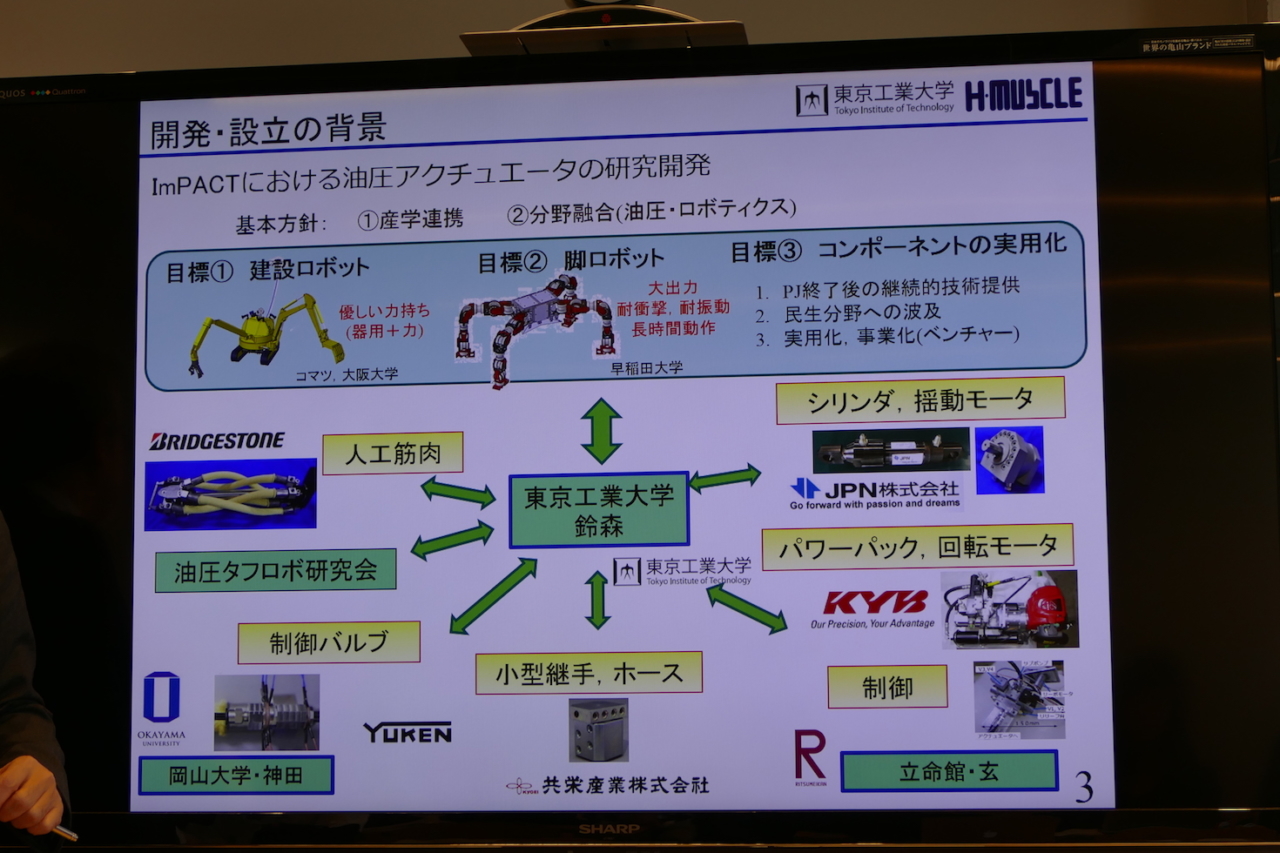
プロジェクトでは産学連携、そして電動と油圧の分野融合を柱とし、他大学と各事業者が携わり、人工筋肉、制御バルブ、小型継手、ホース、シリンダ、揺動モーター、パワーパック、回転モータ、制御など各要素技術を開発した。具体的にはパワーがあり、かつ器用なロボットの開発を目指し、そしてコンポーネントの実用化を目指した。今回の発表はそのうち、シリンダと揺動モータの販売を2月から始めるということになる。ImPACTにおける油圧アクチュエーターの開発の役割分担
頑丈で力が強く、軽く滑らかに動くアクチュエータを開発
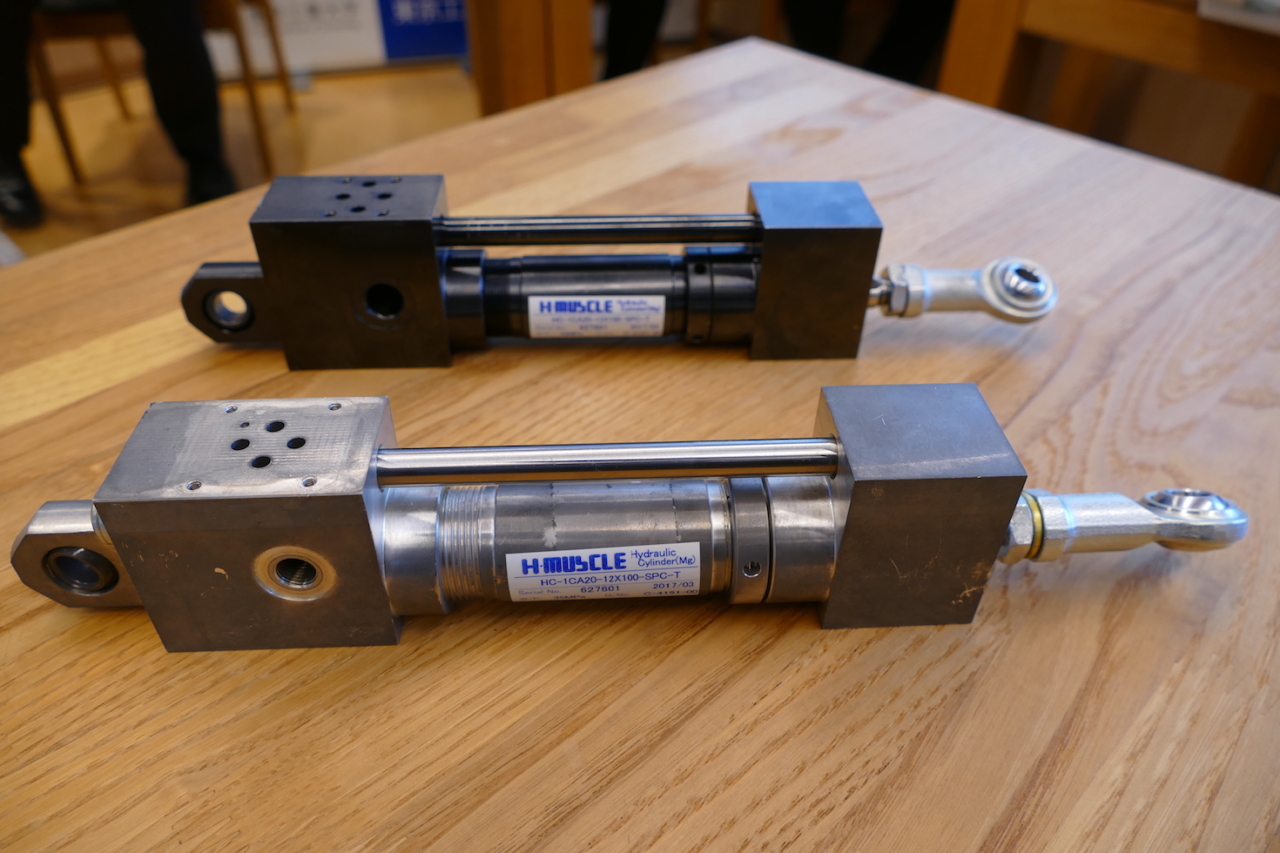
開発した油圧シリンダー。手前が多軸鍛造マグネシウム合金製で軽量
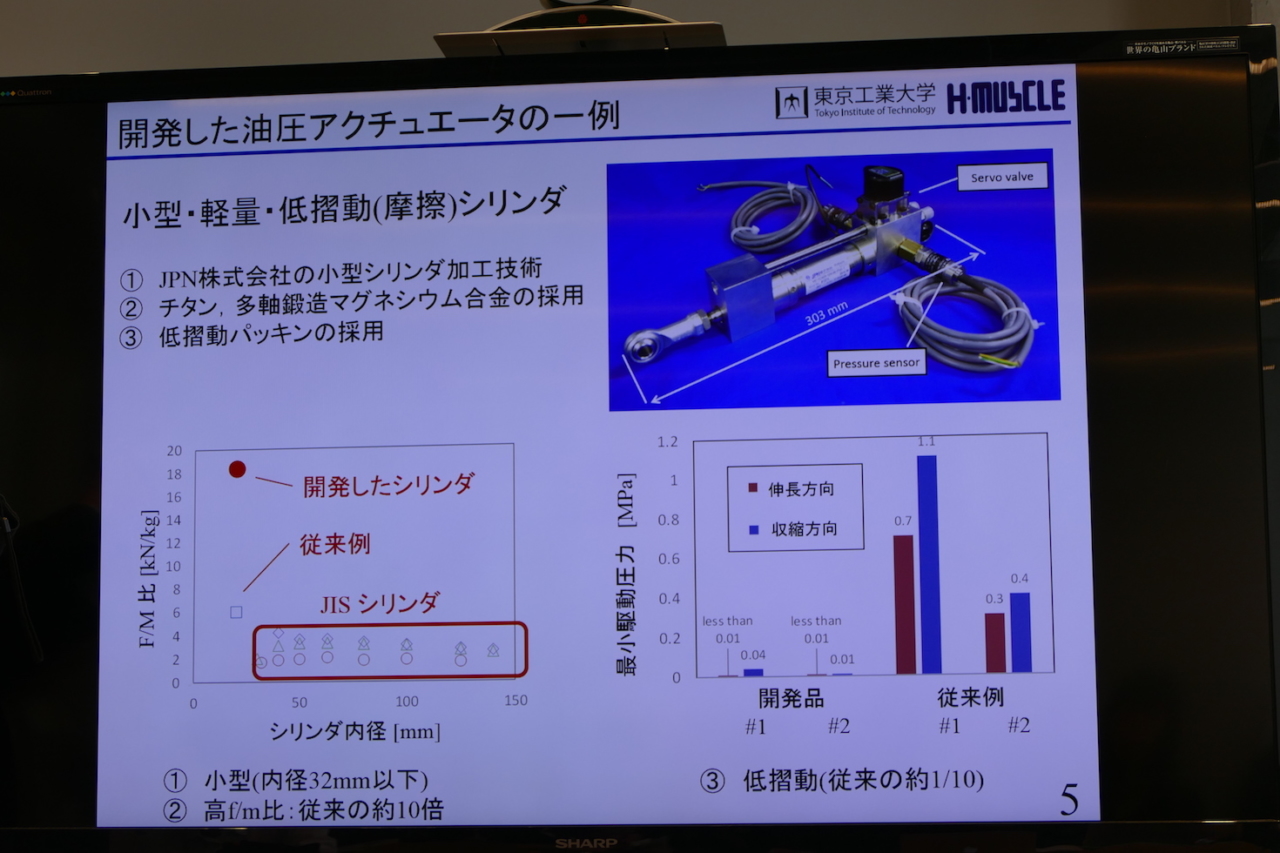
開発ポイントは小型・軽量・高制御性油圧アクチュエータによって、従来の電動モーターを使ったロボットに比べて、格段に大きい耐衝撃性・耐環境性の実現、そして2-4倍程度の大パワーを出せること。そして従来の油圧機器に比べても、ロボットに適した、数倍から10倍程度の高f/m比(出せる力と重さの比)を実現し、1/10以下の低摩擦、なめらかな動きを実現した。つまり小型軽量でパワフル、かつ、繊細に動かせるようになった。従来型の工場で据え置きで使うような油圧アクチュエータではなく、移動ロボットに使えるものになったという。開発した油圧シリンダーは従来のシリンダの数倍の高f/m比を実現
JPN株式会社の小型シリンダ加工技術、チタンや多軸鍛造マグネシウム合金、低摺動パッキンの採用で、従来のJIS規格からは大きく外れるほどの小型化、低摺動を実現した。またロボット向けにケーブルなどを通すための中空シャフトを設けた。バルブなどは従来の汎用のものが使える。圧力は産業用機械の標準21MPaに比べて35MPaと高圧にした。タフな建設重機用多指ハンドとロボット脚に適用
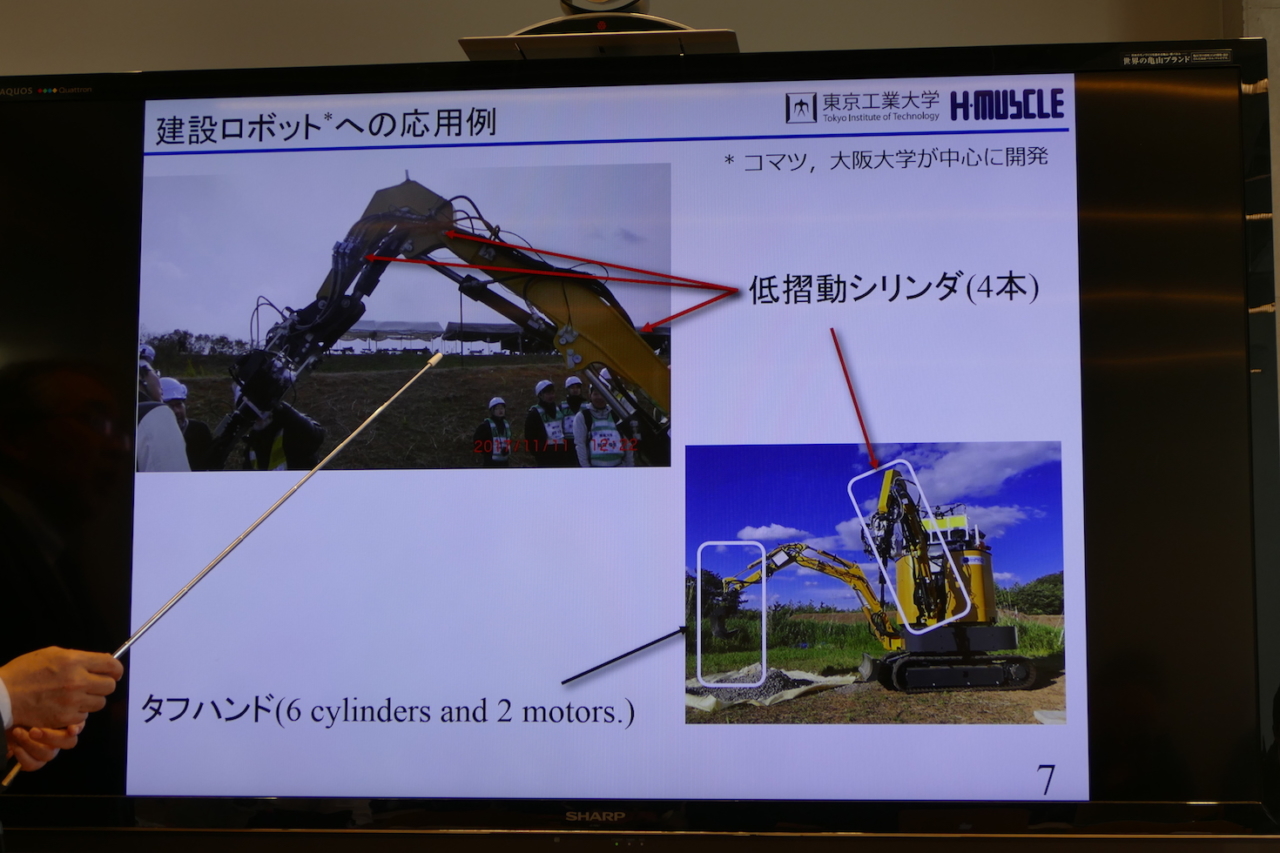
建設ロボットとその先端のタフハンドに適用
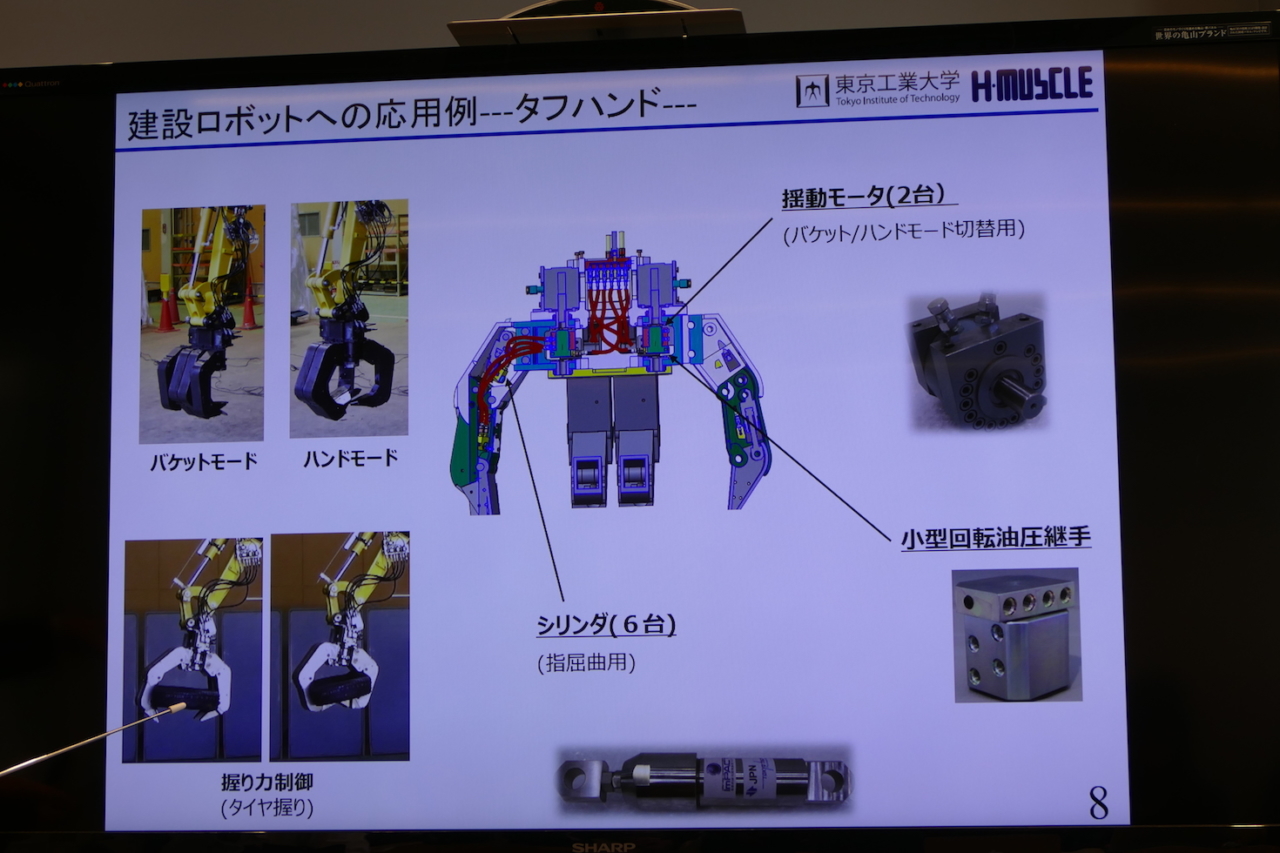
建設ロボットには低摺動シリンダーを4本使用した。そのロボットまたは建設用重機の先端に付けて用いるタフな多指ハンドには6つの油圧シリンダーと揺動モーター2台を使用した。タフハンド。油圧シリンダー6つと揺動モーター2台を用いている
タフハンドは掘削に用いるバケットモードのほか、物体を把持するハンド形状を取ることができ、先端を取り替えることなく、状況に応じて変形させて用いることができる。タフハンドの構成
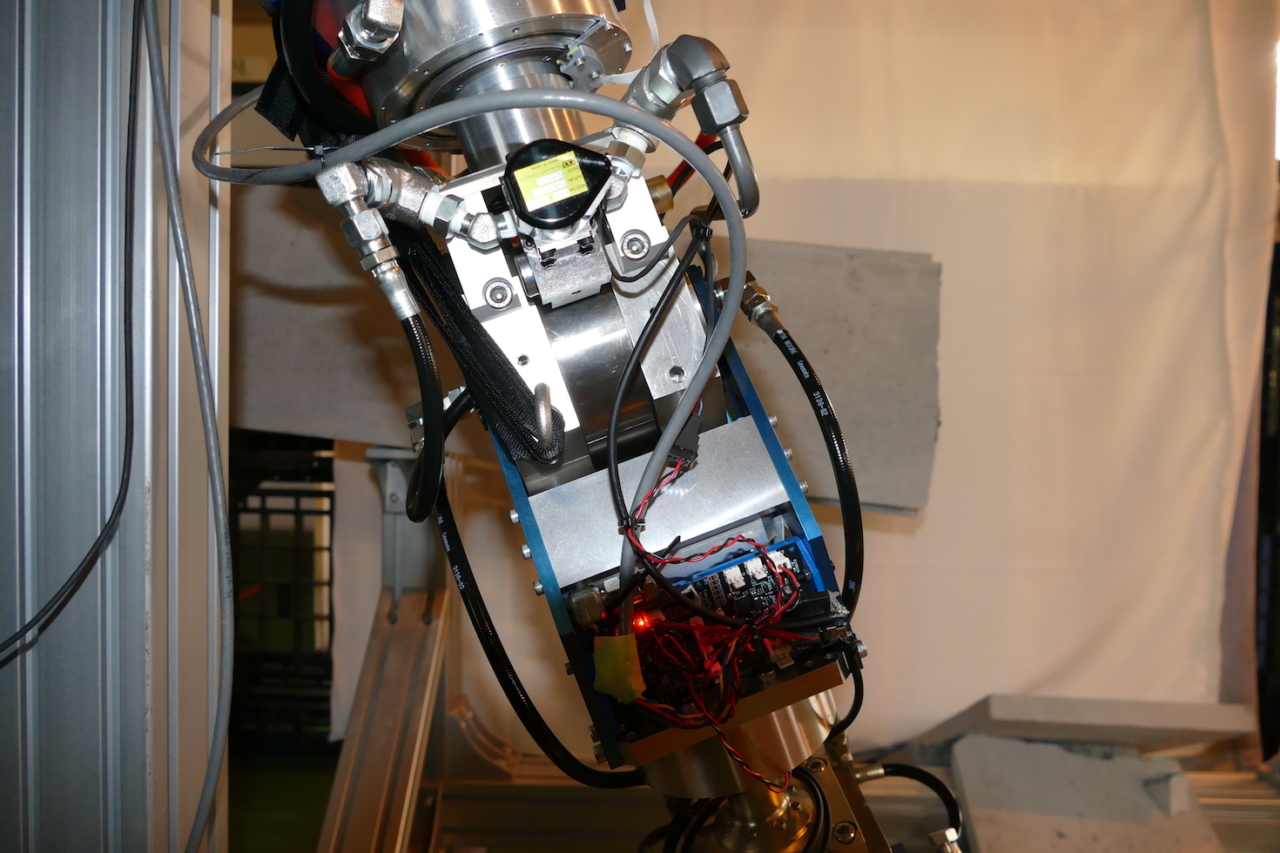
油圧脚ロボット
油圧を用いることで電動よりも大きな力を出せる
300kg以上の圧力でコンクリート建材を一瞬で破砕
まずは研究開発用途として提供
脚ロボットの油圧バルブ部分
今後、まずは研究開発用途にアクチュエーターを提供する。2018年12月現在、自動車関連1社を含む、合計3社から問い合わせを受けているという。最初はカスタム提供になるが、徐々に標準化してコストを下げる。従来の油圧アクチュエーターよりも大幅に軽量化できることから、鈴森氏は「ロボットと自動機械の中間領域にある移動機械なら、多少コストが高くても、使える領域があるのではないか」と語った。タフハンドの操作は現在はトリガー式の操作器で行なっている
H-MUSCLE取締役で、JPN株式会社社長の日沖清弘氏は、まず製品を顧客に提供し、情報を発信することで徐々に問い合わせが増え、そこから用途が拡大することを期待していると語った。H-MUSCLE取締役、JPN株式会社社長 日沖清弘氏
コメント
コメントを投稿