【未来型でかっこいい】自律移動の警備ロボット 「SEQSENSE」(シークセンス)SQ2、実証実験と管理操作画面を三菱地所が公開
【未来型でかっこいい】自律移動の警備ロボット 「SEQSENSE」(シークセンス)SQ2、実証実験と管理操作画面を三菱地所が公開:
 三菱地所は丸の内エリアにおいて「ロボットを活用した豊かな街づくりに向けた取り組み」を積極的に推進している。少子高齢化が進む将来に向けて、ビルメンテナンス、掃除、警備、運搬などの業務における深刻な人手不足をロボットによる自動化で解決をはかりたい考えだ。
三菱地所は丸の内エリアにおいて「ロボットを活用した豊かな街づくりに向けた取り組み」を積極的に推進している。少子高齢化が進む将来に向けて、ビルメンテナンス、掃除、警備、運搬などの業務における深刻な人手不足をロボットによる自動化で解決をはかりたい考えだ。
同社は1月22日に大手町の本社ビルにおいて、実証実験中の様々なロボットを報道陣に公開した。その中のひとつが警備用の自律移動型ロボット「SQ II(ツー)」だ。ロボット開発のスタートアップで明治大学の黒田洋司教授らが設立した企業SEQSENSE(シークセンス: CEOは中村壮一郎氏)社が現在開発しているロボットで、まだ未発売、未導入のものだ。三菱地所は2018年6月にシークセンスに対して5億円を出資した。このロボットをどのように使うのか、どんな機能があるのかが徐々に明らかになってきた。




バッテリー稼働時間は約6時間(警備ロボットの中ではかなり長い)。フル充電に約1.5時間。認識機能など、複雑なシステムを追加するほど稼働時間は短くなると言う。
さて、次は具体的な用途を見ていこう。
「SQ II」は、移動については基本的には自律的に行うことができる。主に予め決められた巡回ポイントを設定しておくと、ロボットが最適なルートを算定し、そのポイントを自律的に巡りながら確認を行っていく。「SQ II」にはLiDARやセンサー、ソナー、そしてカメラ等が搭載され、自律移動中は周囲の人や障害物を検知してぶつからないように動く。

例えば、消化器の設置場所や避難口を巡りながら「消化器の取り出しに邪魔になるものが置かれていないか」「いつもはないはずの不審物は置かれていないか」等のチェックと、ログ付け(記録保存:レポート機能)を行うのに有効だ。
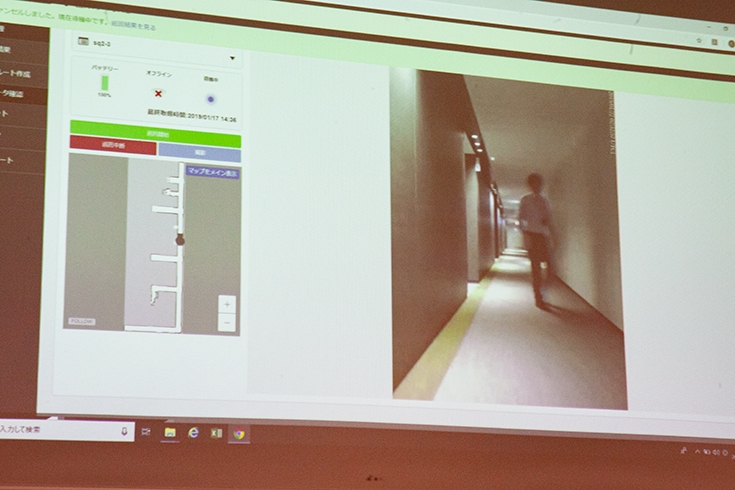
なお、防災センターの映像モニターには、現在のカメラ映像の横に、通常時の画像が並べて表示され、見比べることで不審物が置かれていればセンターが発見しやすいように工夫されている。



またサーモセンサー(体温:温度センサー)を搭載することで、(個人は特定できないが)人の様子を確認することができる。例えば、トイレの個室で誰かが倒れている、といったことも確認することができるようになると見込んでいる。
これらを含めて、何をどこまでできるかがを実証実験を重ねながら検討している最中だと言う。
■動画 シークセンス「SQ II」実証実験 三菱地所による解説
■動画 シークセンス「SQ II」 マネジメントセンターのデモと解説

この質問に対してシークエンスは「警備ロボットと警備カメラとは、併用や連携していく技術。警備ロボットは、監視カメラの死角であったり、見えづらいところに近付いて確認することができる。また、たくさんある固定カメラそれぞれに高精度な認証機能などを搭載するとコスト高になる。声がけを含めて物理的に接触できることも移動型ロボットの特徴のひとつ」とした。
三菱地所は「高性能な警備ロボットが登場することで、固定カメラの設置が本当に必要な場所を再検討していく時代になるかもしれない。施設の出入り口など警備が要所で必要なところは固定カメラを設置し、社内の一般廊下などは巡回のロボットが担当したり、固定カメラが捉えた怪しい場所に警備ロボットが確認に行ったり、警備ロボットが緊急と判断したところに警備員が駆けつける、といった役割分担によって、高い安全性と省力化が実現できるのではないか」と語った。
現時点で警備ロボットの開発で重要なのは、施設内を人や物にぶつからずに安全に移動することだ。そのベースがしっかり開発できれば、顔識別や音声認識、自然会話などはクラウドと連携したシステムを各社が開発しているので、最も優れた技術を提携して活用すれば実現できるだろう。利用の可能性は無限大、今後の進展に期待したい。
同社は1月22日に大手町の本社ビルにおいて、実証実験中の様々なロボットを報道陣に公開した。その中のひとつが警備用の自律移動型ロボット「SQ II(ツー)」だ。ロボット開発のスタートアップで明治大学の黒田洋司教授らが設立した企業SEQSENSE(シークセンス: CEOは中村壮一郎氏)社が現在開発しているロボットで、まだ未発売、未導入のものだ。三菱地所は2018年6月にシークセンスに対して5億円を出資した。このロボットをどのように使うのか、どんな機能があるのかが徐々に明らかになってきた。
三菱地所の本社、大手町パークビルで実証実験と開発が行われているSEQSENSEの警備ロボット「SQ II」。2Dレーダーセンサー(3D相当)、超音波センサー(ソナー)、魚眼カメラ、サーモセンサー、足元の2D赤外線センサーなどを装備している
ロボットが巡回して警備センターが監視
公開の実証実験では、警備を想定して「SQ II」が実際に本社ビルを巡回していた。三菱地所とシークセンスはこの知見を元に開発を進めている。また、実証実験の公開にあたり、会議室に見立ての防災警備センターを設置し、そこから巡回警備の遠隔操作をする様子も公開した。SQ IIを前に警備ロボットの説明をする 三菱地所株式会社 ビル運営事業部 兼 経営企画部 デジタルトランスフォーメーション推進室 統括 渋谷一太郎氏
このロボットはロケットのようなデザインをしていて、とても目を引く。頭頂部がクルクルと回っているところも特撮やSF映画に登場するロボット的だ。実はここにユニークな技術がある。最大の特徴である3次元センサー。2次元のセンサーを3つ装備し、それらを回転させながらたくさんのセンサー画像を輪切りで取得し、それを合成することで3次元の情報を生成する(2018年9月に撮影:横浜ランドマークタワーの実証実験にて)
2次元のセンサーが3つ装備されていて、これを回して取得した2次元の画像データを合わせることで3次元の画像を生成してリアルなセンシングを可能にしている。たくさんの断面図を合成することで立体画像を創りだしているイメージだ。大手町ビルの廊下を巡回する「SQ II」。自律移動の速度は現時点では秒速40cm(モーター性能ではもっと高速にできる)
移動すると周囲の状況を3次元データとしてマッピングできるので、予め持っているマップデータと照合することで自己位置を推定したり、マップと異なる最新の状況を把握することができる。障害物があったり、人で混み合っていても通れる場所を探しながら、進むことができる。バッテリー稼働時間は約6時間(警備ロボットの中ではかなり長い)。フル充電に約1.5時間。認識機能など、複雑なシステムを追加するほど稼働時間は短くなると言う。
さて、次は具体的な用途を見ていこう。
巡回警備
警備員は一日に15~20kmの距離を歩いて巡回するケースもあると言う。将来的には複数台の「SQ II」が巡回し、防災センターでチェックすることで効率化や、自動化による省人化に繋げる考えだ。「SQ II」は、移動については基本的には自律的に行うことができる。主に予め決められた巡回ポイントを設定しておくと、ロボットが最適なルートを算定し、そのポイントを自律的に巡りながら確認を行っていく。「SQ II」にはLiDARやセンサー、ソナー、そしてカメラ等が搭載され、自律移動中は周囲の人や障害物を検知してぶつからないように動く。
巡回中に周囲が人がいてもぶつからないように移動する
カメラの映像は防災警備センターに送られていて、ロボット視点でのリアルタイム映像が確認できる。また、ロボットのスピーカーを通して防災センターからロボットの周囲に話しかけることもできる。倒れている人や不審者に対して「声掛け」をして、警備員が駆けつけるべきかを判断する。また、周囲に社員がいれば挨拶を交わしたり、何かの注意を促すことも考えられるだろう。例えば、消化器の設置場所や避難口を巡りながら「消化器の取り出しに邪魔になるものが置かれていないか」「いつもはないはずの不審物は置かれていないか」等のチェックと、ログ付け(記録保存:レポート機能)を行うのに有効だ。
なお、防災センターの映像モニターには、現在のカメラ映像の横に、通常時の画像が並べて表示され、見比べることで不審物が置かれていればセンターが発見しやすいように工夫されている。
消化器の設置場所に自律的に移動し、所定の位置にあるか、不審物が置かれていないかを確認(2018年9月に撮影:横浜ランドマークタワーの実証実験にて)
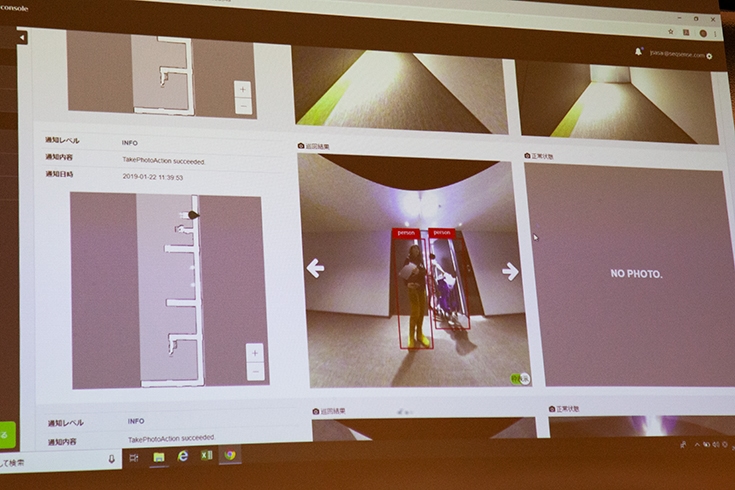
防災センターから遠隔操作で移動させることもできる。その場合、カメラでの目視の操縦になるため、自律より速い速度で移動させることができる。チェック地点で気になったところや、近付いて確認したり、振り向いたり下がったり、といった操作を自律移動から引き継いで操作することができる。カメラの映像(左)と、正常時の画像(右)を並べて表示することで、変化があった場合に警備員が気づきやすい
指定した場所に自律移動できる。人を認識してアラートを出すこともできる(個人の顔識別機能は現在は未搭載)
また、暗所での自律移動も可能だが、暗いとカメラ映像が防災センターからは見えないのでライトを装備している。暗視カメラは導入にあたってクライアントからの要望があれば対応したい考えだ。報道陣への公開にあたって、仮の防災警備センターを設置。ロボット視点の映像や自律移動のしくみ、技術解説、今後の展望などが説明された
今後の開発目標のひとつとして、顔識別機能や顔認証との連携がある。ロボットが捉えたカメラの映像から人の顔の位置を特定し、登録された社員やスタッフかそうではない人物か、ブラックリストに登録されている人物かどうかなどの判別を可能にすることも可能だろう。またサーモセンサー(体温:温度センサー)を搭載することで、(個人は特定できないが)人の様子を確認することができる。例えば、トイレの個室で誰かが倒れている、といったことも確認することができるようになると見込んでいる。
これらを含めて、何をどこまでできるかがを実証実験を重ねながら検討している最中だと言う。
■動画 シークセンス「SQ II」実証実験 三菱地所による解説
立哨警備
立哨とは場所に待機して監視・警戒にあたること。建物の入口に立っている警備員が行っている業務だ。「SQ II」の装備からすれば、立哨には十分活用できる。警備員は怪しかったり、ブラックリストに載っている来訪者は入所を規制するが、現在開発中の「顔識別」機能を使えば、その判別の自動化も可能になるだろう。横浜ランドマークタワーの入口で立哨(立って警備する業務)している「SQ II」。警備員が待機する防災センターに映像を送る監視カメラの役割をする(2018年9月に撮影)
警備ロボット、監視カメラ、警備員が役割分担
監視カメラを数多く設置するのと比較すると、警備ロボットの利点はどこにあるのだろうか。この質問に対してシークエンスは「警備ロボットと警備カメラとは、併用や連携していく技術。警備ロボットは、監視カメラの死角であったり、見えづらいところに近付いて確認することができる。また、たくさんある固定カメラそれぞれに高精度な認証機能などを搭載するとコスト高になる。声がけを含めて物理的に接触できることも移動型ロボットの特徴のひとつ」とした。
三菱地所は「高性能な警備ロボットが登場することで、固定カメラの設置が本当に必要な場所を再検討していく時代になるかもしれない。施設の出入り口など警備が要所で必要なところは固定カメラを設置し、社内の一般廊下などは巡回のロボットが担当したり、固定カメラが捉えた怪しい場所に警備ロボットが確認に行ったり、警備ロボットが緊急と判断したところに警備員が駆けつける、といった役割分担によって、高い安全性と省力化が実現できるのではないか」と語った。
現時点で警備ロボットの開発で重要なのは、施設内を人や物にぶつからずに安全に移動することだ。そのベースがしっかり開発できれば、顔識別や音声認識、自然会話などはクラウドと連携したシステムを各社が開発しているので、最も優れた技術を提携して活用すれば実現できるだろう。利用の可能性は無限大、今後の進展に期待したい。
コメント
コメントを投稿